转自:https://my.oschina.net/macwe/blog/1531024
解读Linux启动过程
1. 概述
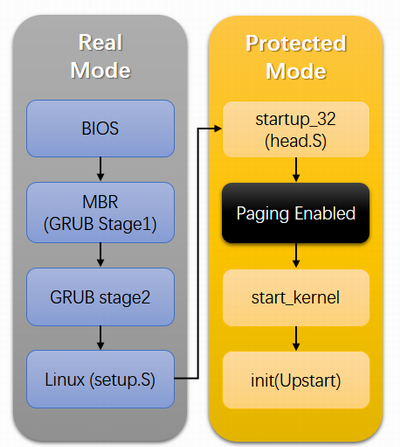
本文解读一下从CPU加电自检到启动init进程的过程, 先通过下面这张图大致看一下Linux启动的整个过程。
本文的分析环境是GRUB 0.97 + Linux 2.6.18。
2. BIOS
CPU加电后首先工作在实模式并初始化CS:IP=FFFF:FFF0,BIOS的入口代码必须从该地址开始。BIOS完成相应的硬件检查并提供一系列中断服务例程,这些中断服务提供给系统软件访问硬件资源(比如磁盘、显示器等),最后选择一个启动盘加载第一个扇区(即:MBR,共512字节)数据到内存0x7C00处,并从这里开始执行指令(CS:IP=0000:7C00),对于笔者的电脑来说这就是GRUB的Stage1部分。
3. GRUB
GRUB的作用是bootloader,用来引导各种OS的。
3.1. Stage1
Stage1就是MBR,由BIOS把它从磁盘的0扇区加载到0x7c00处,大小固定位512字节,此时的CPU上下文如下:
eax=0011aa55 ebx=00000080 ecx=00000000 edx=00000080 esi=0000f4a0 edi=0000fff0
eip=00007c00 esp=00007800 ebp=00000000 iopl=0 nv up ei pl zr na po nc
cs=0000 ds=0000 es=0000 fs=0000 gs=0000 ss=0000 eflags=00000246
因为只能是512字节,大小受限,它就干一件事,把Stage2的第一个512字节读取到0x8000,然后jmp到0x8000继续执行。
3.1.1. 读磁盘
磁盘扇区寻址有两种方式:
- CHS方式:传统的方式,使用三元组(10位Cylinder, 8位Head, 6位Sector)来寻找扇区,最大只能找到
(2^10) * (2^8) * (2^6) * 512 = 8GB的硬盘容量,现在的硬盘明显不够用了。
- LBA方式:现在的方式,使用48位线性地址来寻找扇区,最大支持
(2^48) * 512 = 128PB的硬盘空间。虽然机械上还是CHS的结构,不过磁盘的固件会自动完成LBA到CHS的转换。
因为CHS明显不适合现在的硬盘,所以LBA模式寻址是现在的PC的标配了吧!万一磁盘不支持LBA或者是软盘,需要我们手工转换成CHS模式。转换公式如下(就是三维空间定位一个点的问题):
磁道号C = LBA / 每磁道的扇区数SPT / 盘面总HPC
磁头号H = (LBA / 每磁道的扇区数SPT) mod HPC
扇区号S = (LBA mod SPT) + 1
判断是否支持LBA模式
/* check if LBA is supported */
movb $0x41, %ah
movw $0x55aa, %bx
int $0x13
如果返回成功(CF=1)并且BX值是0xAA55表示支持LBA寻址(用Extensions方法)。
注意:3.5英寸软盘需要使用CHS方式寻址,它的CHS参数是80个柱面、2个磁头、每个磁道18个扇区,每扇区512字节,共1.44MB容量。
LBA模式读的功能号是AH=42h,DL参数是磁盘号,DS:SI参数是Disk Address Packet(DAP)结构体的内存地址,定义如下:
struct DAP {
uint8_t sz;
uint8_t unused;
uint16_t sector_cnt;
struct dst_addr {
uint16_t offset;
uint16_t segment;
};
uint64_t lba_addr;
};
参考:
- https://en.wikipedia.org/wiki/Logical_block_addressing#CHS_conversion
- https://en.wikipedia.org/wiki/INT_13H
3.2. Stage2
Stage2就是GRUB剩下的全部的代码了,包括BIOS中断服务的封装给C代码使用、键盘驱动、文件系统驱动、串口、网络驱动等等,它提供了一个小型的命令行环境,可以解析用户输入命令并执行对OS的启动。
3.2.1. start.S
首先Stage2的头512字节(start.S)被加载到0x8000,并在这里开始执行,此时的CPU上下文如下:
eax=00000000 ebx=00007000 ecx=00646165 edx=00000080 esi=00007c05 edi=0000fff0
eip=00008000 esp=00001ffe ebp=00000000 iopl=0 nv up ei pl zr na po nc
cs=0000 ds=0000 es=0800 fs=0000 gs=0000 ss=0000 eflags=00000246
start.S的工作是把Stage2的后续部分全部加载到内存中(从0x8200开始),有103KB大小。
3.2.2. asm.S
asm.S是0x8200处的代码,先看一下CPU上下文环境:
eax=00000e00 ebx=00000001 ecx=00646165 edx=00000080 esi=00008116 edi=000081e8
eip=00008200 esp=00001ffe ebp=000062d8 iopl=0 nv up ei pl zr na po nc
cs=0000 ds=0000 es=1ae0 fs=0000 gs=0000 ss=0000 eflags=00000246
3.2.2.1. 最开始的代码应该设置好段寄存器和栈
cli
xorw %ax, %ax
movw %ax, %ds
movw %ax, %ss
movw %ax, %es
movl $STACKOFF, %ebp
movl %ebp, %esp
sti
此时:
cs=0000 ds=0000 es=0000 ss=0000 esp=00001ff0 ebp=00001ff0。
3.2.2.2. 保护模式和实模式
因为GRUB没有实现自己的中断服务,所以访问硬件资源还是使用BIOS的中断服务例程(实模式)。GRUB的命令行环境是工作在保护模式下的,所以当GRUB需要访问BIOS中断的时候需要切换回实模式,于是在GRUB执行过程中会有频繁的实模式和保护模式的互相切换操作,当切换回实模式后别忘了保存保护模式下的栈指针。
(1) 实模式进入保护模式
DATA32 call EXT_C(real_to_prot)
.code32
下图是实模式到保护模式的切换步骤:
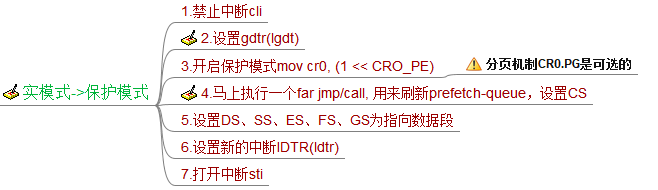
GRUB没有设置分页机制和新的中断,所以GRUB的保护模式访问的是物理内存且是不能使用INT指令,不过对于bootloader来说够用了。因为需要切换到保护模式栈,原来的返回地址要放到新的栈上,以保证能够正常ret:
ENTRY(real_to_prot)
...
movl (%esp), %eax
movl %eax, STACKOFF ; 把返回地址保存起来备用
movl protstack, %eax
movl %eax, %esp
movl %eax, %ebp ; 设置保护模式的栈
movl STACKOFF, %eax
movl %eax, (%esp) ; 把返回地址重新放到栈上
xorl %eax, %eax
ret ; 正常返回
(2) 保护模式切换回实模式
call EXT_C(prot_to_real)
.code16
下图说明了保护模式切换回实模式的步骤:
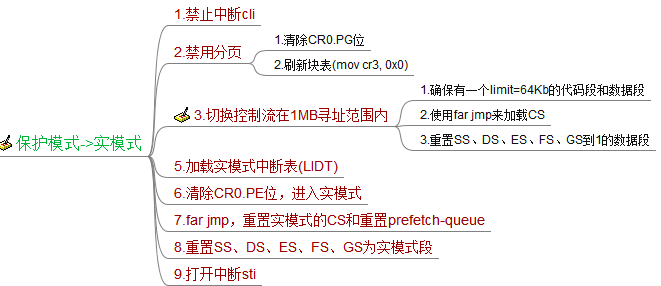
保护模式的栈需要保存起来以便恢复现场,让C代码正确运行,实模式的栈每次都重置为STACKOFF即可,和(1)一样,也要设置好返回地址:
ENTRY(prot_to_real)
...
movl %esp, %eax
movl %eax, protstack ; 把栈保存起来
movl (%esp), %eax
movl %eax, STACKOFF ; 返回地址放到实模式栈里
movl $STACKOFF, %eax ; 设置实模式的栈
movl %eax, %esp
movl %eax, %ebp
...
3.2.2.3. 创建C运行时环境
C的运行环境主要包括栈、bss数据区、代码区。随着切换到保护模式,栈已经设置好了;随着Stage2从磁盘加载到内存,代码区和bss区都已经在内存了,最后还需要把bss区给初始化一下(清0),接下来即可愉快的执行C代码了。
3.2.2.4. 执行cmain()
先执行一个init_bios_info()获取BIOS的信息,比如被BIOS使用的内存空间(影响我们Linux映像加载的位置)、磁盘信息、ROM信息、APM信息,最后调用cmain()。 cmain()函数在stage2.c文件中,其中最主要的函数run_menu()是启动一个死循环来提供命令行解析执行环境。
3.2.2.5. load_image()
如果grub.cfg或者用户执行kenrel命令,会调用load_image()函数来将内核加载到内存中。至于如何加载linux镜像在Documentation的boot.txt和zero-page.txt有详细说明。
load_image()是一个非常长的函数,它要处理支持的各种内核镜像格式。Linux镜像vmlinuz文件头是struct linux_kernel_header结构体,该结构体里头说明了这个镜像使用的boot协议版本、实模式大小、加载标记位和需要GRUB填写的一些参数(比如:内核启动参数地址)。
- 实模式部分:始终被加载到0x90000位置,并从0x90200开始执行(linux 0.11就这样做了)。
- 保护模式部分:我们现在使用的内核比较大(大于512KB),叫做bzImage,加载到0x100000(高位地址,1MB)开始的位置,可以任意大小了。否则小内核zImage放在0x10000到
mbi.mem_lower * 1024(一般是0x90000)区域。
3.2.2.6. linux_boot()
我们正常的启动过程调用的是big_linux_boot()函数,把实模式部分copy到0x90000后,设置其他段寄存器值位0x9000, 设置CS:IP=9020:0000开始执行(使用far jmp)。
至此GRUB的工作完成,接下来执行权交给Linux了。
4. setup.S
该文件在arch/i386/boot/setup.S,主要作用是收集硬件信息并进入保护模式head.S。初始的CPU上下文如下:
eax=00000000 ebx=00009000 ecx=00000000 edx=00000003 esi=002d8b54 edi=0009a000
eip=00000000 esp=00009000 ebp=00001ff0 iopl=0 nv up di pl zr na po nc
cs=9020 ds=9000 es=9000 fs=9000 gs=9000 ss=9000 eflags=00000046
4.1. 自身检查
先检查自己setup.S是否合法,主要是检查末尾的两个magic是否一致
setup_sig1: .word SIG1
setup_sig2: .word SIG2
4.2. 收集硬件信息
主要是通过BIOS中断来收集硬件信息。收集的信息包括内存大小、键盘、鼠标、显卡、硬盘、APM等等。收集的硬件信息保存在0x9000处:
movw %cs, %ax
subw $DELTA_INITSEG, %ax
movw %ax, %ds
这里看一下如何获取内存大小,这样OS才能进行内存管理。这里用三种方法获取内存信息:
- e820h:请求中断INT 15H,AX=E820H时返回可用的物理内存信息,e820由此得名,参考http://www.uruk.org/orig-grub/mem64mb.html。由于内存的使用是不连续的,通过连续调用INT 15H得到所有可用的内存区域,每次查询得到的结果ES:DI是个struct address_range_descriptor结构体,返回的结果都是64位的,完全能够满足目前PC的需求了。
struct address_range_descriptor {
uint32_t base_addr_low;
uint32_t base_addr_high;
uint32_t length_low;
uint32_t length_high;
uint8_t type;
};
- e801h:通过请求中断INT15h,AX=e801H返回结果,最高只能得到4GB内存结果。
- 88h:古老的办法,通过请求中断INT15h,AH=88H返回结果。最高只能得到16MB或者64MB的内存,现在的电脑不适用了。
扩展阅读:http://wiki.osdev.org/Detecting_Memory_(x86)#E820h
4.3. 启用A20
让CPU访问1MB以上的扩展内存,否则访问的是X mod 1MB的地址。下面列举三种开启A20的方法:
- 使用I/0端口92H,AL的将1-bit置1
inb $0x92, %al
orb $0x02, %al
andb $0xFE, %al
outb %al, $0x92
- 使用BIOS中断INT 0x15, AX=0x2401
movw $0x2401, %ax
pushfl
int $0x15
popfl
- 使用键盘控制器
movb $0xD1, %al
outb %al, $0x64
call empty_8042
movb $0xDF, %al
outb %al, $0x60
call empty_8042
4.4. 进入保护模式
4.4.1. 临时的GDT和IDT
这里的IDT全部是0;Linux目前使用的GDT如下:
gdt:
.fill GDT_ENTRY_BOOT_CS,8,0
.word 0xFFFF
.word 0
.word 0x9A00
.word 0x00CF
.word 0xFFFF
.word 0
.word 0x9200
.word 0x00CF
gdt_end:
这里只定义了两个DPL为0的代码段和数据段,只给内核使用的。
4.4.1. 设置CR0.PE
这里使用lmsw指令,它和mov cr0, X是等价的
movw $1, %ax
lmsw %ax
jmp flush_instr
4.5. 调转到head.S(CS:EIP=0x10:100000)
至此硬件信息就收集完成,这些收集到的硬件信息都保存在0x90000处,后续OS可以使用这些硬件信息来管理了。
5. head.S
该文件位于arch/i386/kernel/head.S,这个是内核保护模式的代码的起点,笔者电脑的位置在0x100000,此时CPU上下文是:
eax=00000001 ebx=00000000 ecx=0000ff03 edx=47530081 esi=00090000 edi=00090000
eip=00100000 esp=00008ffe ebp=00001ff0 iopl=0 nv up di pl nz na pe nc
cs=0010 ds=0018 es=0018 fs=0018 gs=0018 ss=0018 eflags=00000002
注:已经进入保护模式,CS的值是GDT表项的索引。
它的作用就是设置真正的分段机制和分页机制、启动多处理器、设置C运行环境,最后执行start_kernel()函数。
5.1. startup_32
5.1.1. 加载临时的分段机制
boot_gdt_table就是临时的GDT,其实和start.S的一样:
lgdt boot_gdt_descr - __PAGE_OFFSET
movl $(__BOOT_DS),%eax
movl %eax,%ds
movl %eax,%es
movl %eax,%fs
movl %eax,%gs
ENTRY(boot_gdt_table)
.fill GDT_ENTRY_BOOT_CS,8,0
.quad 0x00cf9a000000ffff /* kernel 4GB code at 0x00000000 */
.quad 0x00cf92000000ffff /* kernel 4GB data at 0x00000000 */
5.1.2. 初始化内核bss区和内核启动参数
为了让C代码正常运行,bss区全部清0,启动参数需要移动到boot_params位置。
5.1.3. 启动临时分页机制
临时的页表,只要能够满足内核使用就行。页目录表是swapper_pg_dir,它是一个4096大小的内存区域,默认全是0。一般__PAGE_OFFSET=0xC0000000(3GB),这是要把物理地址0x00000000映射到0xc0000000的地址空间(内核地址空间)。下面是页目录表和页表的初始化代码:
page_pde_offset = (__PAGE_OFFSET >> 20);
movl $(pg0 - __PAGE_OFFSET), %edi
movl $(swapper_pg_dir - __PAGE_OFFSET), %edx
movl $0x007, %eax
10:
leal 0x007(%edi),%ecx
movl %ecx,(%edx)
movl %ecx,page_pde_offset(%edx)
addl $4,%edx
movl $1024, %ecx
11:
stosl
addl $0x1000,%eax
loop 11b
leal (INIT_MAP_BEYOND_END+0x007)(%edi),%ebp
cmpl %ebp,%eax
jb 10b
movl %edi,(init_pg_tables_end - __PAGE_OFFSET)
下面是对上面代码的翻译(这样更有利于理解):
extern uint32_t *pg0;
extern uint32_t *swapper_pg_dir;
void init_page_tables()
{
uint32_t PAGE_FLAGS = 0x007;
uint32_t page_pde_offset = (_PAGE_OFFSET >> 20);
uint32_t addr = 0 | PAGE_FLAGS;
uint32_t *pg_dir_ptr = swapper_pg_dir;
uint32_t *pg0_ptr = pg0;
for (;;) {
*pg_dir_ptr = pg0 | PAGE_FLAGS;
*(uint32_t *)((char *)pg_dir_ptr + page_pde_offset) = pg0 | PAGE_FLAGS;
pg_dir_ptr++;
for (int i = 0; i < 1024; i++) {
*pg0++ = addr;
addr += 0x1000;
}
if (pg0[INIT_MAP_BEYOND_END] | PAGE_FLAGS) >= addr) {
init_pg_tables_end = pg0_ptr;
return;
}
}
};
5.1.4. 设置栈
lss stack_start,%esp
ENTRY(stack_start)
.long init_thread_union+THREAD_SIZE
.long __BOOT_DS
union thread_union init_thread_union
__attribute__((__section__(".data.init_task"))) =
{ INIT_THREAD_INFO(init_task) };
内核最初使用的栈是init_task进程的,也就是0号进程的栈,这个进程是系统唯一一个静态定义而不是通过fork()产生的进程。
5.1.5. 设置真正的IDT和GDT
lgdt cpu_gdt_descr // 真正的GDT
lidt idt_descr //真正的IDT
ljmp $(__KERNEL_CS),$1f // 重置CS
1: movl $(__KERNEL_DS),%eax
movl %eax,%ss
movl $(__USER_DS),%eax
movl %eax,%ds
movl %eax,%es
xorl %eax,%eax
movl %eax,%fs
movl %eax,%gs
lldt %ax
cld
// push一个假的返回地址以满足 start_kernel()函数return的要求
pushl %eax
对于IDT先全部初始化成ignore_int例程:
setup_idt:
lea ignore_int,
movl $(__KERNEL_CS << 16),
movw
movw $0x8E00,
lea idt_table,
mov $256,
rp_sidt:
movl
movl
addl $8,
dec
jne rp_sidt
ret
ignore_int例程就干一件事,打印一个错误信息"Unknown interrupt or fault at EIP %p %p %p\n"。
对于GDT我们最关心的__KERNEL_CS、__KERNEL_DS、__USER_CS、__USER_DS这4个段描述符:
.quad 0x00cf9a000000ffff
.quad 0x00cf92000000ffff
.quad 0x00cffa000000ffff
.quad 0x00cff2000000ffff
至此分段机制、分页机制、栈都设置好了,接下去可以开心的jmp start_kernel了。
6. start_kernel
该函数在linux/init/main.c文件里。我们可以认为start_kernel是0号进程init_task的入口函数,0号进程代表整个linux内核且每个CPU有一个。 这个函数开始做一系列的内核功能初始化,我们重点看rest_init()函数。
6.1.rest_init
这是start_kernel的最后一行,它启动一个内核线程运行init函数后就什么事情也不做了(死循环,始终交出CPU使用权)。
static void noinline rest_init(void)
{
kernel_thread(init, NULL, CLONE_FS | CLONE_SIGHAND);
……
cpu_idle();
}
6.2. init()
该函数的末尾fork了”/bin/init”进程。这样1号进程init就启动了,接下去就交给init进程去做应用层该做的事情了!
// 以下进程启动后父进程都是0号进程
if (ramdisk_execute_command) {
run_init_process(ramdisk_execute_command);
printk(KERN_WARNING "Failed to execute %s\n",
ramdisk_execute_command);
}
/*
* We try each of these until one succeeds.
*
* The Bourne shell can be used instead of init if we are
* trying to recover a really broken machine.
*/
if (execute_command) {
run_init_process(execute_command);
printk(KERN_WARNING "Failed to execute %s. Attempting "
"defaults...\n", execute_command);
}
run_init_process("/sbin/init");
run_init_process("/etc/init");
run_init_process("/bin/init");
run_init_process("/bin/sh");
附录1. 启动多核CPU
以上解读的内容只在0号CPU上执行,如果是多CPU的环境,还要初始化其他的CPU。多CPU启动的起点是start_kernel()->rest_init()–>init()->smp_init()。而smp_init()函数给每个CPU上调用cpu_up()和do_boot_cpu()函数,每个CPU都要再走一遍head.S的流程,然后启动自己的idle进程(内核态0号进程)。
附录2. x64的不同
i386和x64的启动代码主要区别在head.S中。
- 页表格式不同,i386使用两级页表,x64使用4级页表。
- 多了兼容32位的代码段和数据段
__USER32_CS、__USER32_DS和__KERNEL32_CS。
- x64段寄存器用法和i386的不同:x64下面CS、DS、ES、SS不用了,始终为0。而FS、GS寄存器的用法倒像是实模式下的,主要考虑是保留两个作为基地址好让线性地址计算方便。
FS:XX = MSR_FS_BASE + XX, GS:XX = MSR_GS_BASE + XX, 不是段描述符索引了(像实模式的分段)。